♛ Understanding the N-Queens Problem
The N-Queens problem is a classic puzzle that perfectly demonstrates local search concepts. Let's start with the simpler 4-Queens version to understand the fundamentals.
Problem Definition:
- Goal: Place N queens on an N×N chessboard
- Constraint: No two queens can attack each other
- Attack Rules: Queens attack along rows, columns, and diagonals
- Solution: Any valid arrangement satisfying all constraints
Understanding Queen Attacks:
- Horizontal: Queens attack all squares in their row
- Vertical: Queens attack all squares in their column
- Diagonal: Queens attack along both diagonal directions
♛ The 8-Queens Problem: Optimization Approach
Now let's scale up to the classic 8-Queens problem and see how we convert this constraint satisfaction problem into an optimization problem suitable for local search.
Optimization Formulation:
- State: All 8 queens placed on the board (one per column)
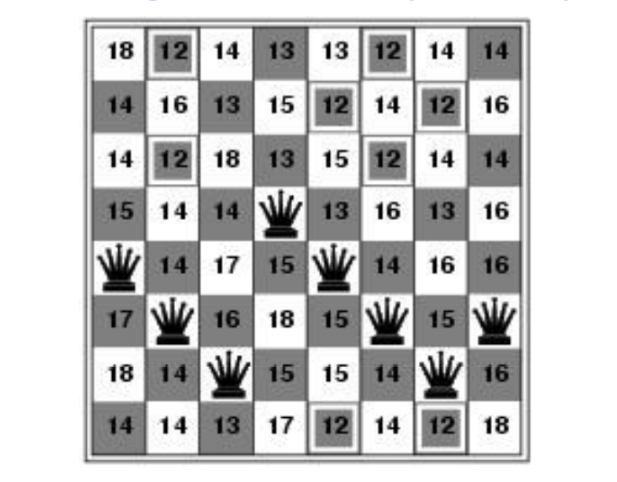
- Objective Function h(n): Number of pairs of queens attacking each other
- Goal: Minimize h(n) to reach h = 0 (perfect solution)
- Neighbor Definition: Move one queen to different row in same column
Why This Formulation Works:
- Measurable Progress: Each move can be evaluated numerically
- Local Improvements: Can make greedy decisions based on h-value
- Clear Termination: h = 0 means we found a solution
- Neighbor Generation: Easy to generate all possible single-queen moves
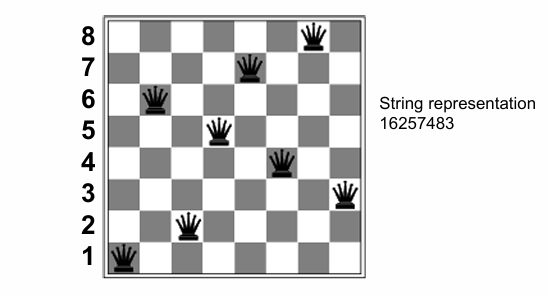
State Representation: We can represent each state as a string like "24748552" where position i contains the row number of the queen in column i.
🗺️ The Hill Climbing Landscape: Understanding the Terrain
Before diving into specific problems, let's visualize the optimization landscape that hill climbing algorithms must navigate. This landscape metaphor helps us understand why local search can get stuck.
Understanding the Terrain:
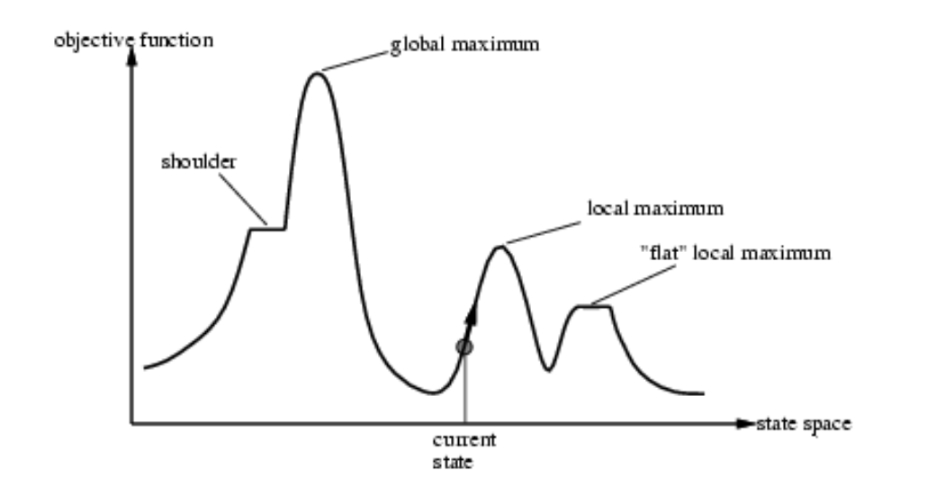
- Global Maximum: The highest peak - our ultimate goal
- Local Maximum: Smaller peaks that can trap the algorithm
- Shoulder: Flat areas that extend from peaks
- Current State: Where our algorithm is currently positioned
- State Space: All possible configurations we can explore
🧬 Genetic Algorithms: Evolution in Action
Instead of maintaining a single solution, genetic algorithms maintain a population of solutions and evolve them over generations using principles inspired by natural selection.
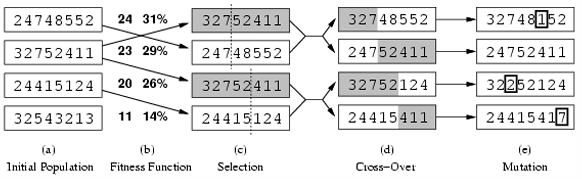
Population Initialization
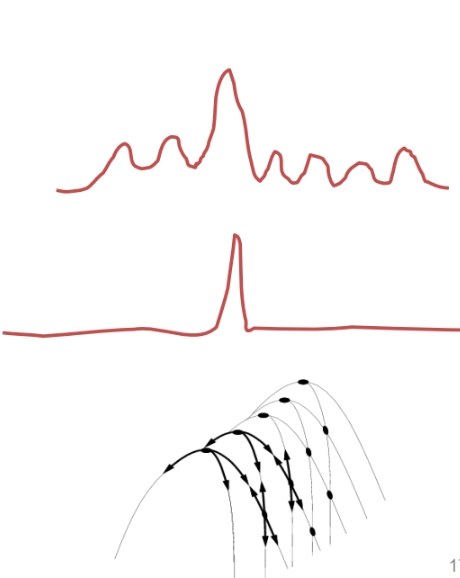
Start with a diverse population of random solutions (typically 50-1000 individuals). Each solution is encoded as a string (like DNA). The first image shows various initial N-Queens configurations.
Fitness Evaluation
Evaluate each individual using a fitness function (opposite of cost function). Better solutions get higher fitness scores and higher reproduction probability.
Selection for Reproduction
Choose pairs of parents for breeding based on fitness. Common methods: roulette wheel selection, tournament selection, rank-based selection.
Crossover (Recombination)
Combine genetic material from two parents to create offspring. For strings, this might mean swapping segments at random crossover points.
Mutation
Randomly change small parts of offspring to maintain genetic diversity and explore new areas of the search space.