🧭 What are Heuristics?
A heuristic is like giving an AI system "intuition" about how close it is to the goal.
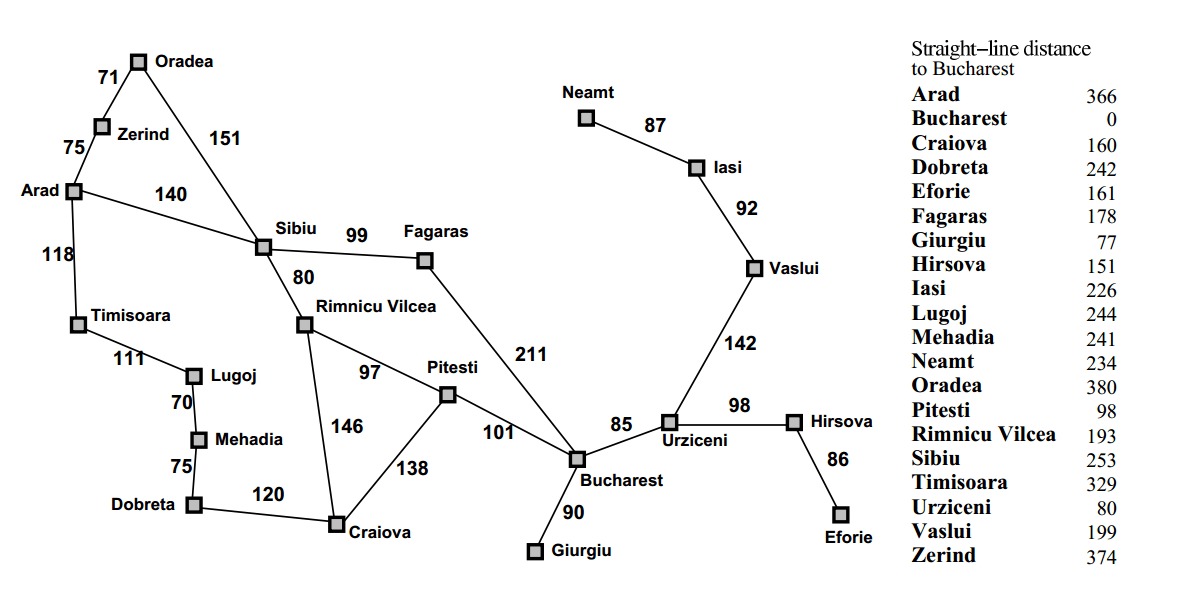
Romania Map - Our Classic AI Example
🚫 Without Heuristics (BFS Problem)
Scenario: We are at Iasi and want to go to Oradea
Iasi → Neamt: cost = 87
Iasi → Vaslui: cost = 92
BFS chooses Neamt (87 < 92)
🔄 Problem: From Neamt, we can only return to Iasi!
Back at Iasi: same choice again → infinite loop!
Iasi ↔ Neamt ↔ Iasi ↔ Neamt...
Back at Iasi: same choice again → infinite loop!
Iasi ↔ Neamt ↔ Iasi ↔ Neamt...
🎯 With Heuristics (A* Solution)
Solution: f(n) = g(n) + h(n)
After returning from Neamt:
Total distance = 87 + 87 = 174
Now Vaslui is better choice!
✅ A* considers both:
• g(n) = distance already covered
• h(n) = straight-line distance to goal
Prevents loops and guides toward goal!
• g(n) = distance already covered
• h(n) = straight-line distance to goal
Prevents loops and guides toward goal!
- h(n) = straight-line distance: Never overestimates actual road distance
- Admissible heuristic: Optimistic but never too optimistic
- Guides search: Towards promising directions, avoids loops
- f(n) = g(n) + h(n): Balances past cost with future estimate
🎯 DFBB Problem: Find Optimal Path A to G
Let's solve a classic problem: Find the optimal (shortest) path from node A to node G.
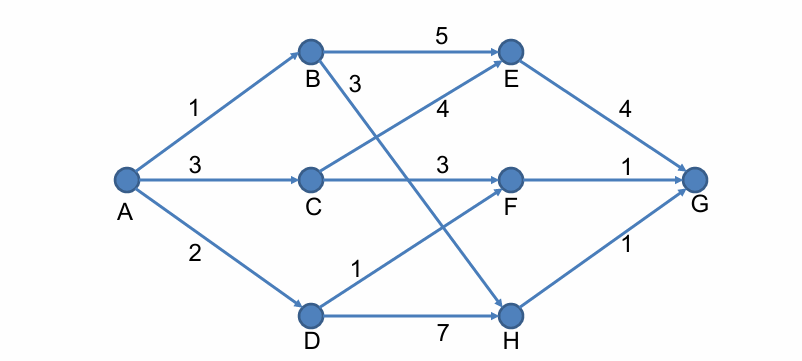
Problem Graph: Find shortest path from A to G
🎯 Goal: Find the path from A to G with minimum total cost using Depth-First Branch & Bound
- Branch: Generate paths systematically using DFS
- Bound: Use upper bound to prune suboptimal branches
- Optimal: Guaranteed to find the shortest path
- Systematic: Never expands the same node twice
📊 Edge Costs Summary
From A:
A→B: 1, A→C: 3, A→D: 2
A→B: 1, A→C: 3, A→D: 2
From B:
B→E: 5, B→C: 3
B→E: 5, B→C: 3
From C:
C→E: 4, C→F: 3, C→D: 1
C→E: 4, C→F: 3, C→D: 1
From D:
D→H: 7
D→H: 7
From E:
E→F: 4, E→G: 4
E→F: 4, E→G: 4
From F:
F→H: 1, F→G: 1
F→H: 1, F→G: 1
From H: H→G: 1
🌳 DFBB Search Tree Exploration
Depth-First Branch & Bound systematically explores all paths while pruning suboptimal branches.
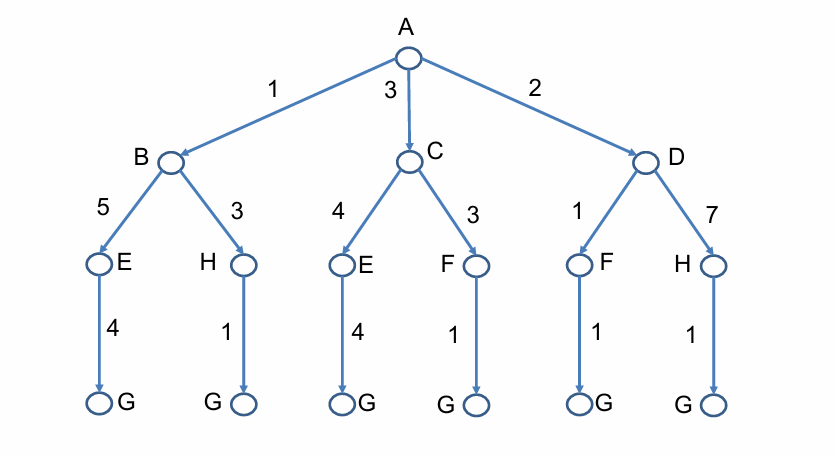
Complete Search Tree Structure
Step-by-Step Exploration with Pruning
🔍 DFBB Process Summary
🌳 Complete Search Tree:
1. Start at A (cost = 0)
2. Expand A → B, C, D
3. Choose B first (cost = 1)
4. From B → E (cost = 6), C (cost = 4)
5. Continue systematic exploration
6. Terminate expanding nodes when bound exceeded
1. Start at A (cost = 0)
2. Expand A → B, C, D
3. Choose B first (cost = 1)
4. From B → E (cost = 6), C (cost = 4)
5. Continue systematic exploration
6. Terminate expanding nodes when bound exceeded
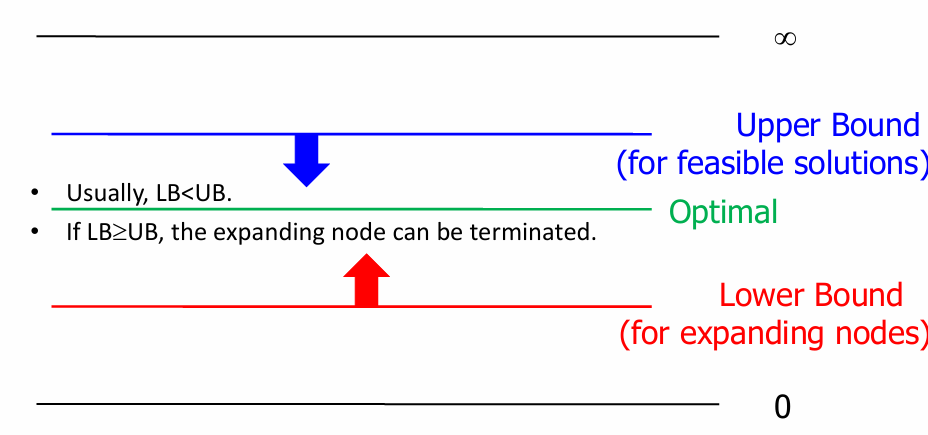
✂️ Bound-based Pruning:
• Usually UB < UB (Upper Bound improves)
• If UB > UB, the expanding node can be terminated
• For feasible solutions: update bounds
• For expanding nodes: compare with current bound
• Optimal path found when all branches explored or pruned
• Usually UB < UB (Upper Bound improves)
• If UB > UB, the expanding node can be terminated
• For feasible solutions: update bounds
• For expanding nodes: compare with current bound
• Optimal path found when all branches explored or pruned
🏆 DFBB systematically explores the complete search tree while using bounds to prune suboptimal branches
🎯 Key insight: Upper bound guides pruning decisions - when current path cost exceeds best known solution, terminate that branch
🎯 Key insight: Upper bound guides pruning decisions - when current path cost exceeds best known solution, terminate that branch
⚡ Efficiency: DFBB guarantees optimal solution by exploring all promising paths while eliminating provably suboptimal branches early!